Hey there! This is Vihaan Akshaay!
Follow @VihaanAkshaaySanta Barbara, California
vihaanakshaay@gmail.com
About
I am an Applied AI Researcher with first-author publications at top-tier venues, including ICLR 2025 and NeurIPS 2023, in Computer Vision and Deep Reinforcement Learning. My work spans five research internships across premier institutions, including The Jackson Laboratory (JAX), IIT Madras, Georgia Tech, NTU Singapore, and a joint role at UC Santa Barbara and Carnegie Mellon University.
My research bridges disciplines—developing AI systems for biological behavior analysis, robotics, mechanical systems, and Earth sciences. At IIT Madras, I led the iBot Robotics Club and co-developed the ARTEMIS Railroad Crack Detection Robot, winning the International James Dyson Award. My Master’s thesis on unsupervised behavior recognition in mice was advised by B. Ravindran and Dr. Vivek Kumar at JAX.
I recently completed my M.S. in Computer Science at UC Santa Barbara, working under Lei Li and Yu-Xiang Wang. Inspired by human problem-solving strategies, I proposed a bi-directional framework for goal conditioning in state-space search. I also introduced an edge-attention-based U-Net for environmental segmentation and helped curate a large-scale landslide detection dataset with Gen Li using 40 years of Landsat imagery.
Other projects include analyzing the stability of Deep Q-Networks with Siva Theja Maguluri at Georgia Tech and designing kernelized deep randomized models (eDRVFLs) with P. N. Suganthan at NTU Singapore.
I specialize in translating cutting-edge AI theory into practical, high-impact solutions across domains. I am currently seeking opportunities in applied AI research or machine learning engineering roles, particularly those focused on impactful, real-world applications.
Education
University of California, Santa Barbara
Master of Science (Computer Science)
Master of Science in Computer Science (Machine Learning Specialization)

Indian Institute of Technology, Madras
Dual Degree (B.Tech in Mechanical Engineering + M.Tech in Robotics)
Bachelor of Technology in Mechanical Engineering & Inter Disciplinary Master of Technology in Robotics

Udacity
Robotics Software Engineer Nanodegree
Programmed various robots in simulation and worked with Jetson TX2 hardware implementing various robotic algorithms(Localization, Mapping, SLAM, Path Planning and Navigation, 3D perception, Deep Learning, Manipulator Kinematics) and tools(ROS using python & C++, RViz, Gazebo and more).
Skills
Python, C++, Ruby, HTML, MATLAB, Mathematica, TensorFlow, Keras, PyTorch, ROS (Robot Operating System), PCL(Point Cloud Library), Gazebo, RViz, Blender, Fusion360, Jupyter, Git, Linux
Probabilistic Robotic Algorithms (Localization, Mapping, SLAM, Path planning and Navigation), Applied Deep Reinforcement Learning, Innovative Robotic Solution Modelling, Fusion360
Coding Activity
Research Projects
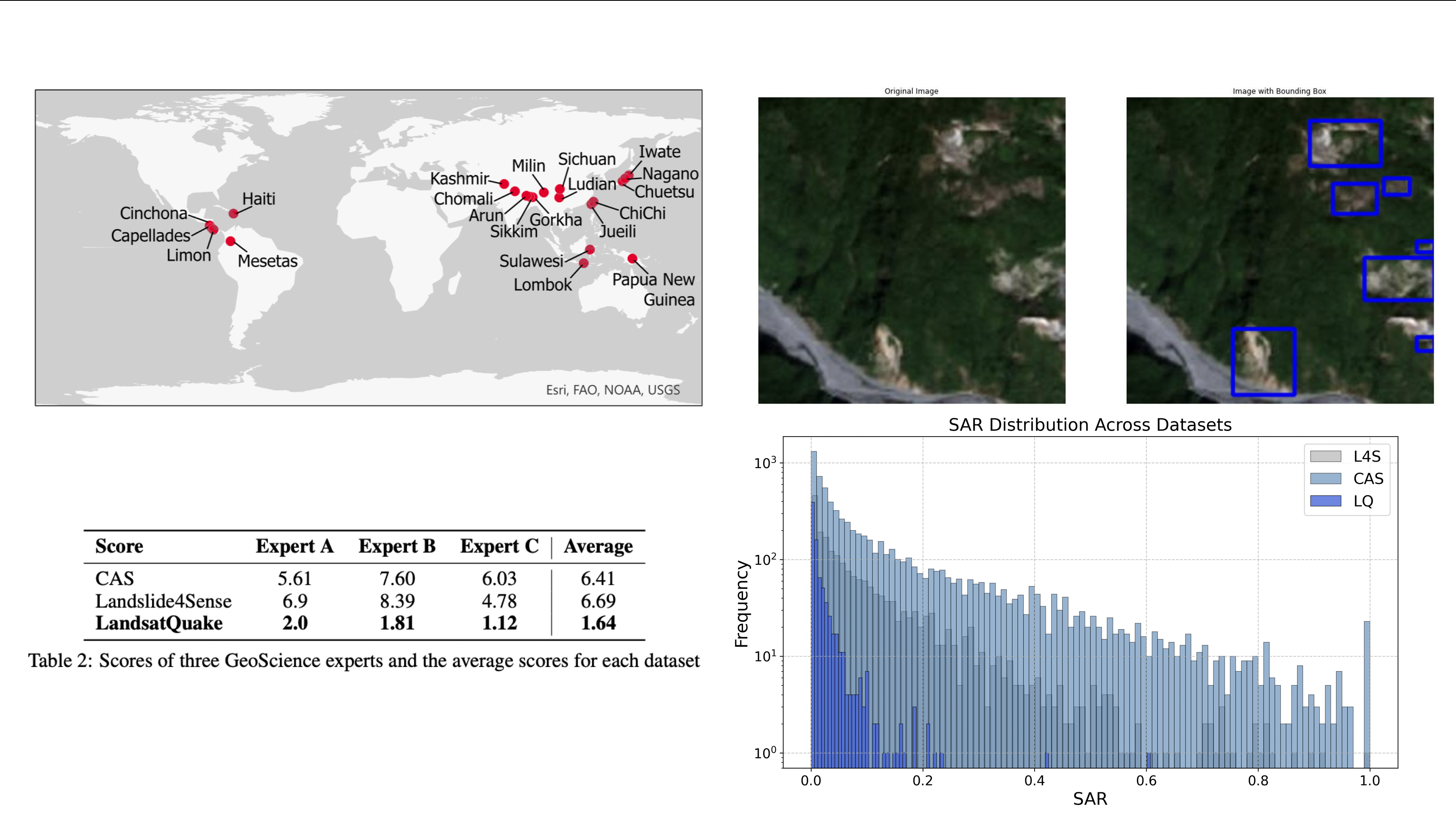
ICLR 2025, Machine Learning for Remote Sensing Workshop
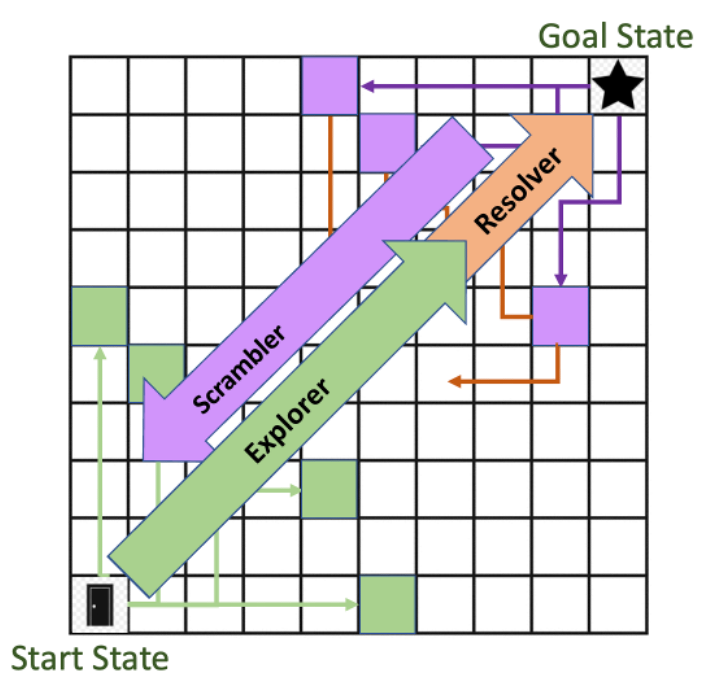
NeurIPS 2023, Goal-Conditioned Reinforcement Learning Workshop
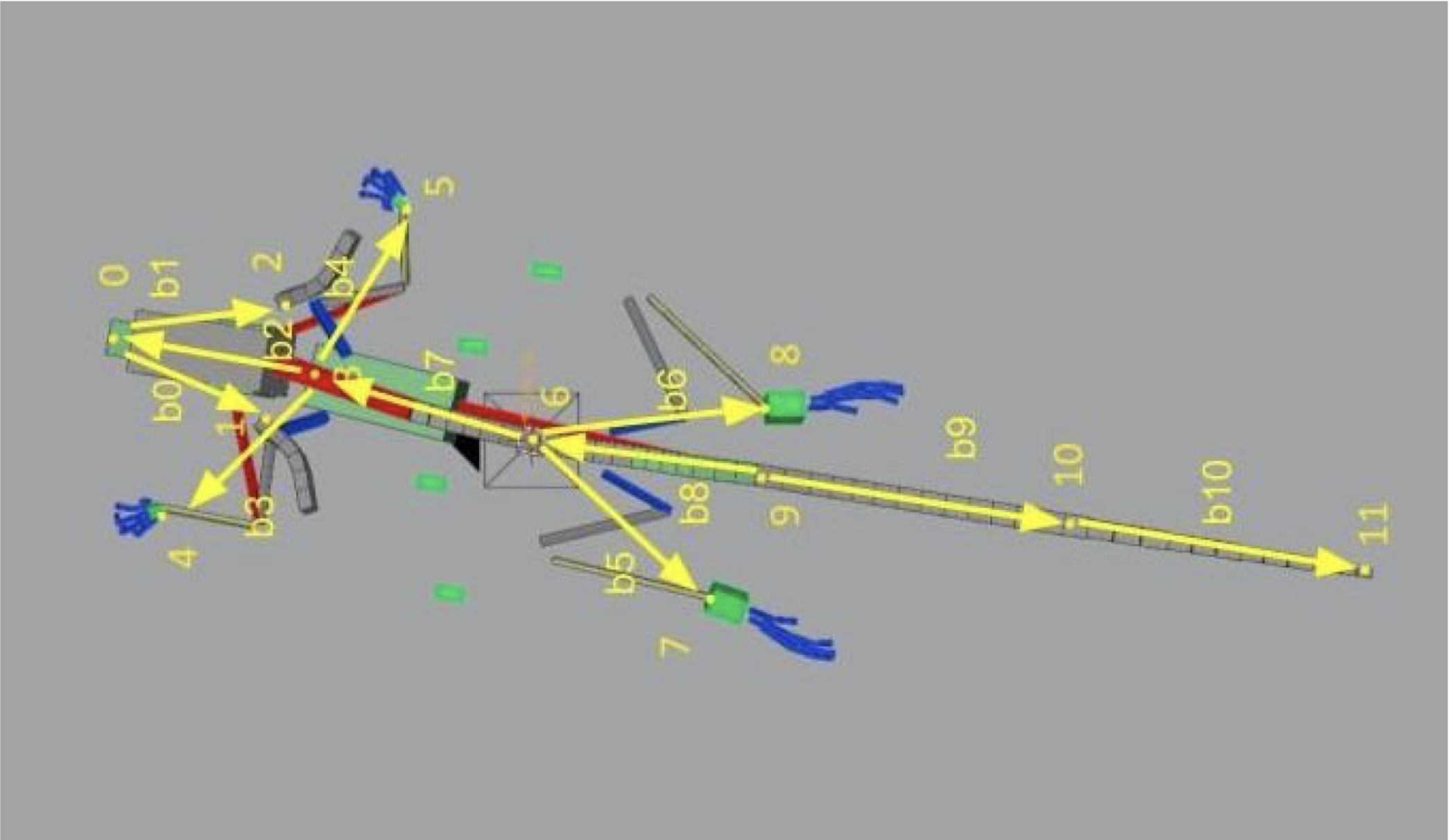
Master's Thesis, Indian Institute of Technology Madras
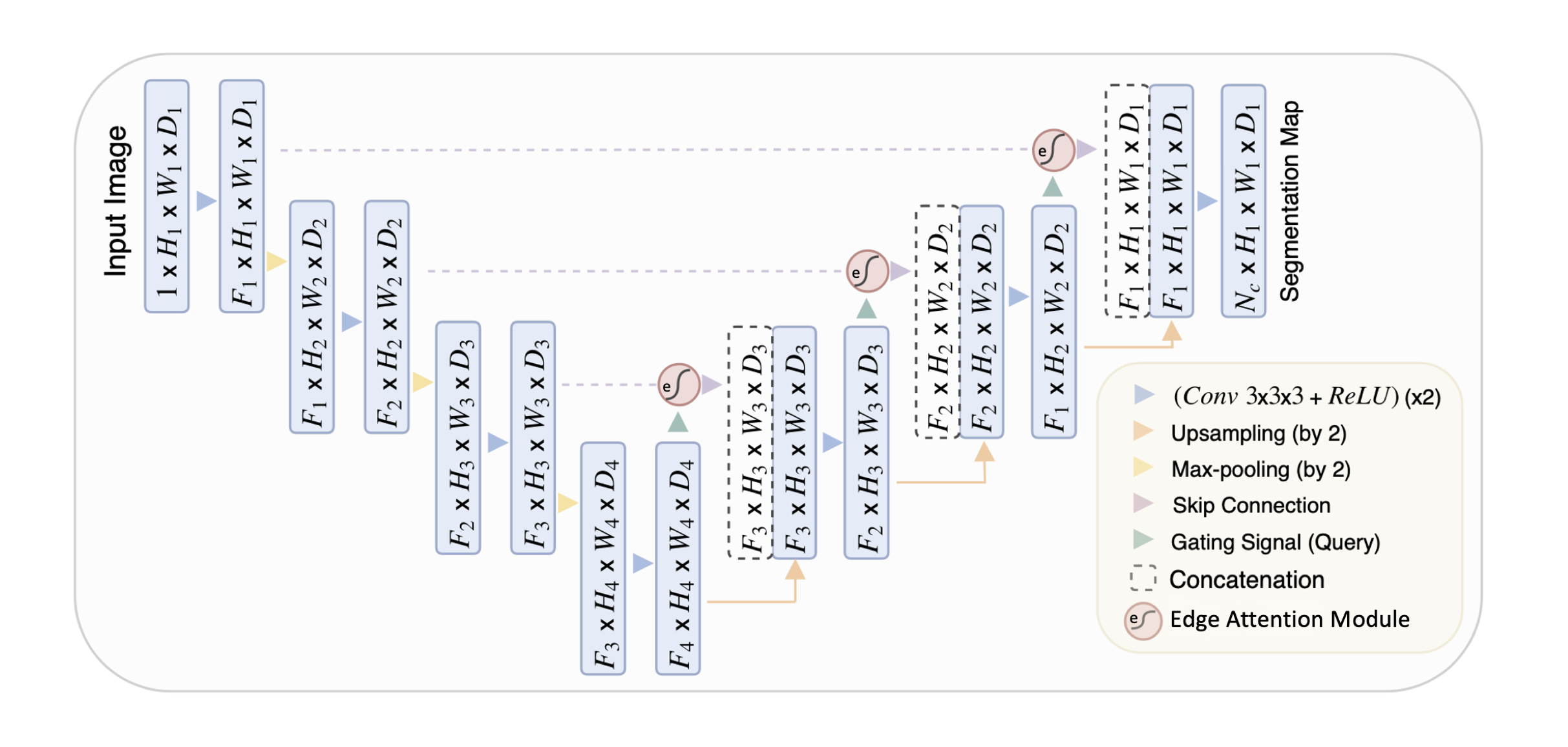
Advanced Topics in Computer Vision Course Project
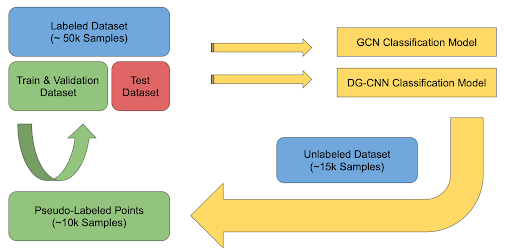
Machine Learning for Graphs Course Project
Robotics Projects
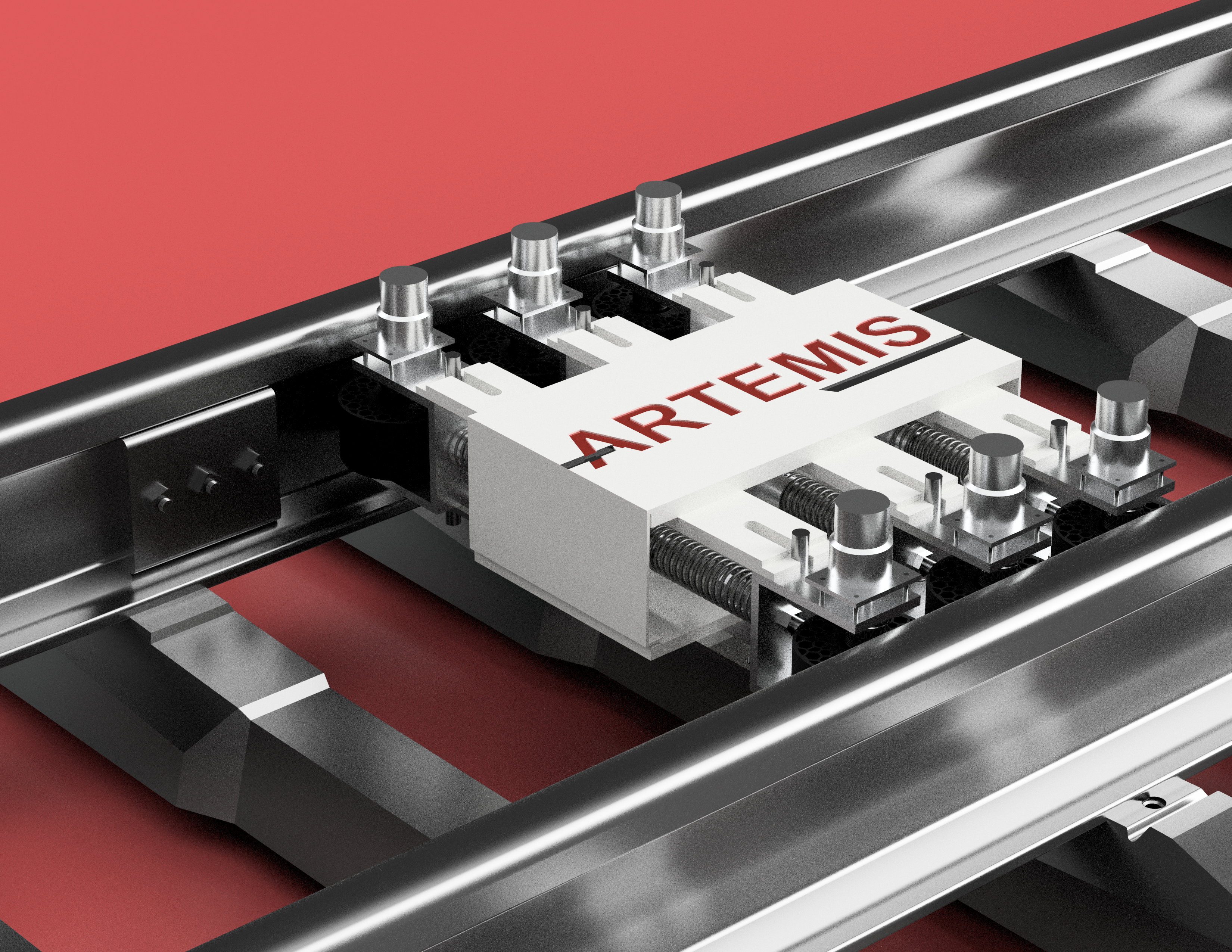
ARTEMIS - Railroad Crack Detection Robot
ARTEMIS is an autonomous robot that traverses inbetween the railway tracks, detects faults and sends the coordinates for further action to be taken. [Patented & James Dyson International Award Winner]

Robotic Arm - Pick and Place
The goal of the project is to solve is to simulate a robotic arm and perform a pick-and-place exercise very similar to Amazon Robotics Challenge.
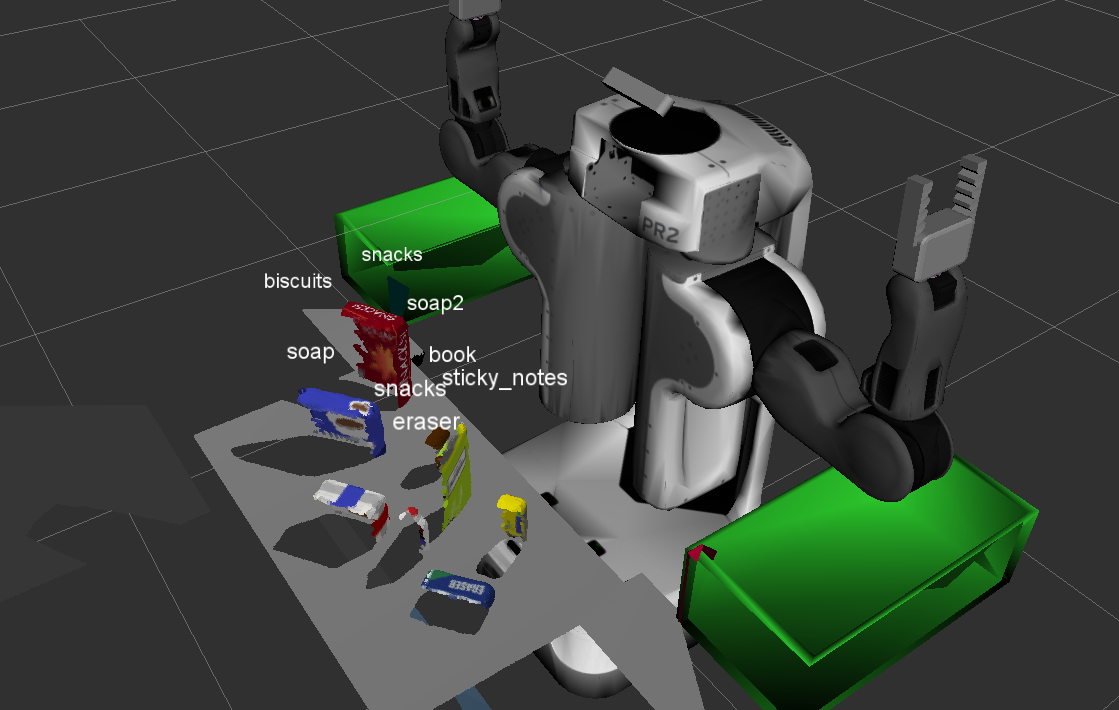
3D Perception Project
The goal of this project is to program a PR2 to identify and acquire target objects from a cluttered space and place them in a bin. The project is based on the 'Stow Task' portion of Amazon's Robotics Challenge.
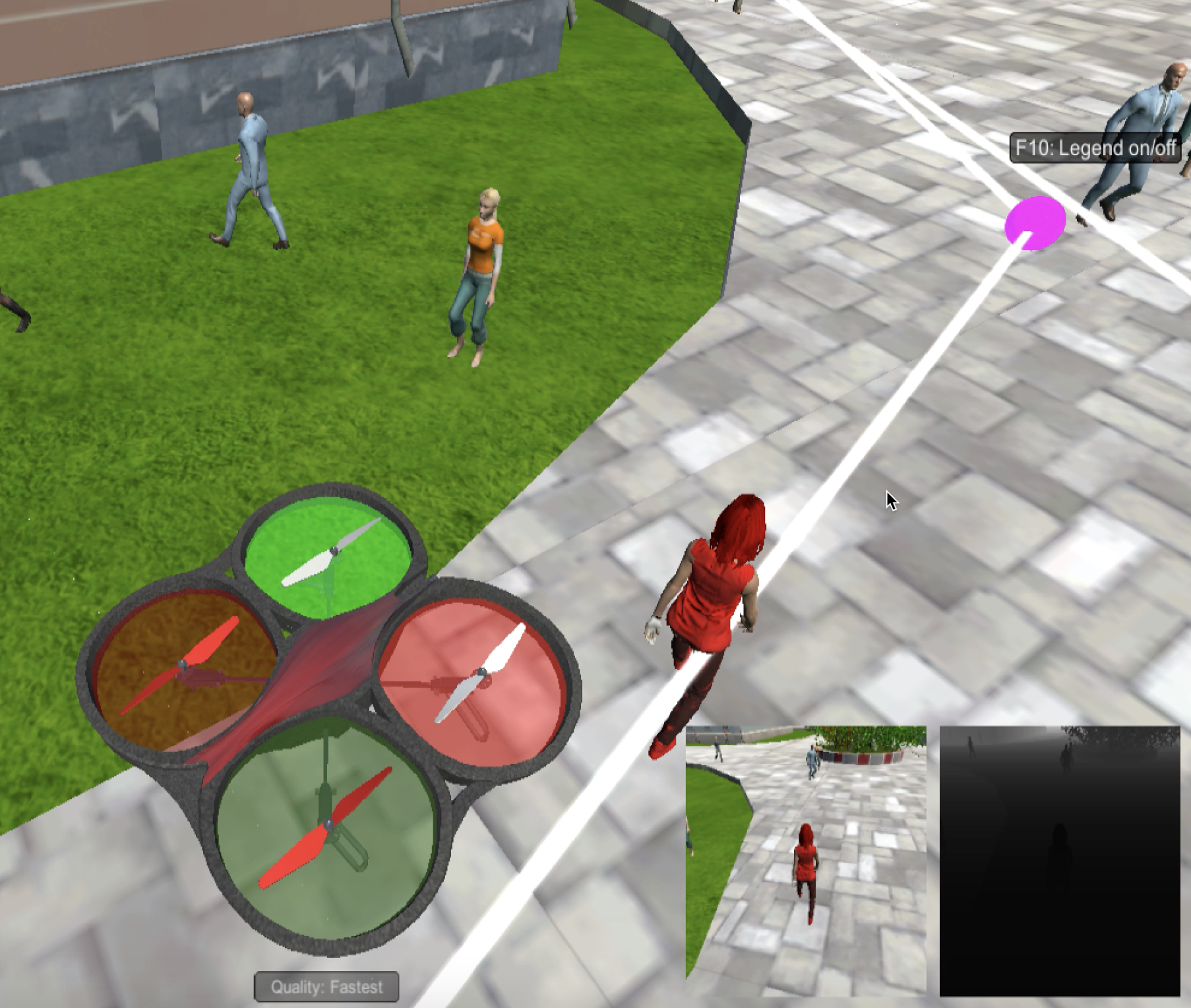
Robotic Arm - Pick and Place
In a simulated environment, given camera input from a drone, the goal is to train a fully convoluted neural network to identify the location of a moving target and to control the drone to follow the same.
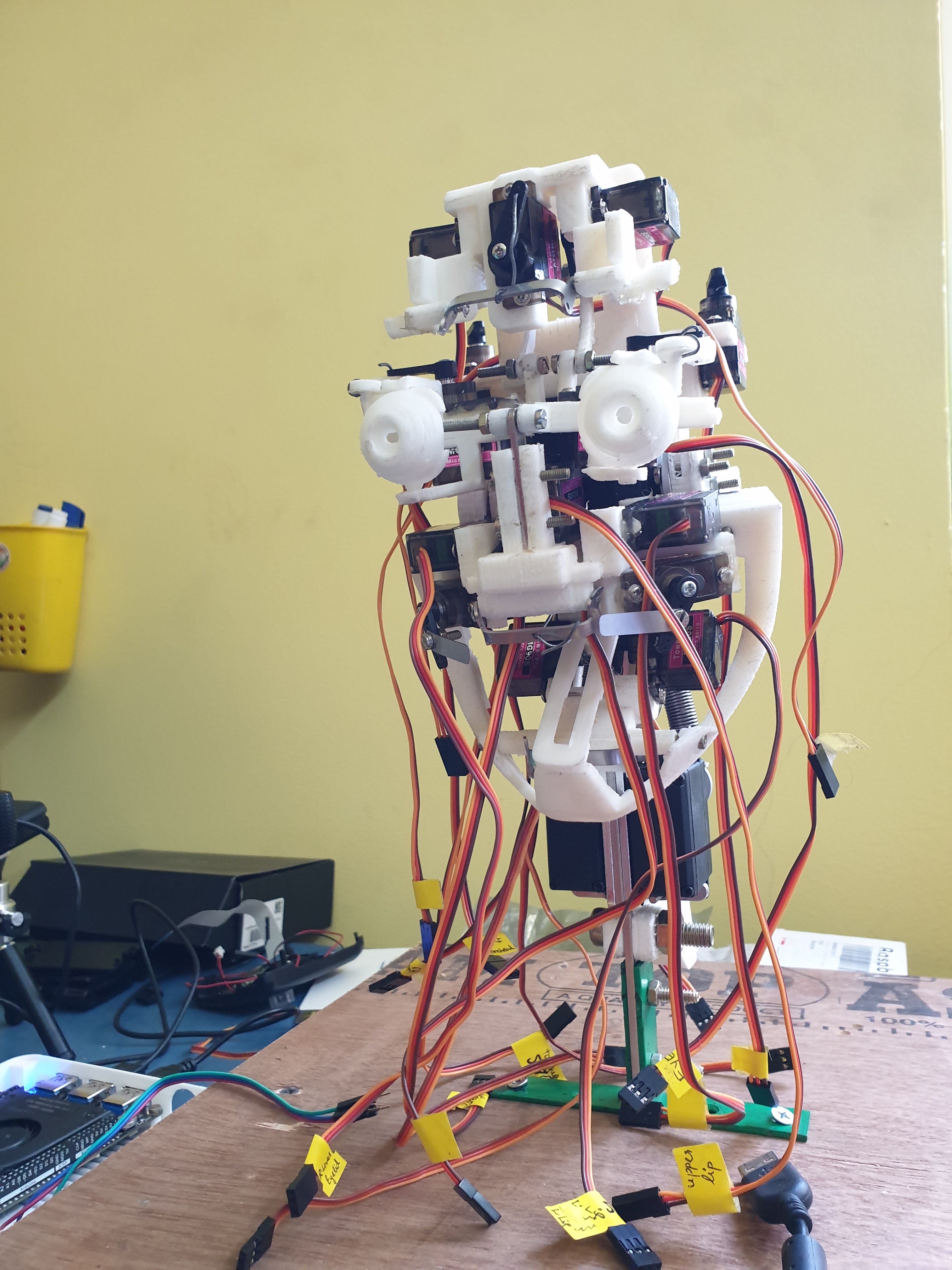
Biley Bot
Designed and Contributed to 'Biley Bot,' an interactive humanoid representation of young Swami Vivekananda, incorporating advanced technologies like NVIDIA Jetson, Qualcomm RB3, and Intel RealSense sensors, with a 3D-printed exterior that exemplifies humanoid design principles for an engaging museum experience.
Work Experience

Graduate Student Researcher
Jackson Laboratory
Developed unsupervised techniques to discover stereotyped behaviours exhibited by mice moving in a fixed arena. Computer Vision models were used for pose estimation from video data recorded by Jackson Labs are improved. By modeling behaviours as hierarchies, new option discovery algorithms were implemented to identify repeated behaviours. Dr. Ravindran B, Indian Institute of Technology Madras & Dr. Vivek Kumar, Jackson Labs, Bar Harbor, Maine.
iBot(Robotics) Club Head
iBot Club, Centre for Innovation
Managed and mentored various projects as well as conducted robotics oriented session with the aim of improving the tech culture in the institute.

Robotics Intern
Ramakrishna Math, Chennai
Worked on 'Biley Bot', a lifelike, interactive humanoid robot of young Swami Vivekananda, soon to be displayed in Vivekanandar House Museum, Chennai.

Summer Engineering Intern
Toyota Kirloskar Motor Pvt Ltd
Industrial internship with on-field experience from a reputed manufacturing factory. Experience on workshop floor included a project study on Backdoor Cushion Rubber Miss Elimination.